Калабаратыўныя рабатызаваныя рукі грузападымальнасцю 6 кг





Калабаратыўныя рабатызаваныя рукі грузападымальнасцю 6 кг
Галоўная катэгорыя
Прамысловая робата-маніпулятор / Калабаратыўны робата-маніпулятор / Электрычны захоп / Інтэлектуальны прывад / Рашэнні для аўтаматызацыі
Прыкладанне
Кобаты SCIC Z-Arm — гэта лёгкія 4-восевыя калабарацыйныя робаты з убудаваным прывадным рухавіком, якія больш не патрабуюць рэдуктараў, як іншыя традыцыйныя SCARA, што зніжае кошт на 40%. Кобаты SCIC Z-Arm могуць выконваць такія функцыі, як, але не абмяжоўваючыся імі, 3D-друк, апрацоўка матэрыялаў, зварка і лазерная гравіроўка. Яны здольныя значна павысіць эфектыўнасць і гнуткасць вашай працы і вытворчасці.
Асаблівасці

Высокая дакладнасць
Паўтаральнасць
±0,05 мм
Вялікая карысная нагрузка
Падстаўка 4 кг
Максімум 5 кг
Больш высокая хуткасць
Максімальная лінейная хуткасць 1,4 м/с
(Нагрузка на падстаўку 4 кг)
Канкурэнтаздольная цана
Якасць прамысловага ўзроўню
Cканкурэнтаздольная цана
Лёгка праграмуецца, хутка ўсталёўваецца, гнуткая 4-восевая рабатызаваная рука
Высокая нагрузка
Стандартная загрузка: 4 кгМаксімальная нагрузка: 5 кг
Высокая дакладнасць
Паўтаральнасць: ±0,05 мм
Наладжвальная вось Z
Ход уверх і ўніз можна наладзіць у межах ад 10 мм да 1000 мм
Высокая хуткасць
Яго лінейная хуткасць дасягае 1400 мм/с пры нагрузцы 4 кг.
Просты ў выкарыстанні
Ён таксама просты ў выкарыстанні нават для тых, хто раней не ведаў робата
Інтэграваны прывад і кантролер
Няма лішніх ланцугоў, лёгка ўсталяваць і сабраць

Звязаныя тавары



Параметр спецыфікацыі
SCIC Z-Arm 4150 распрацаваны кампаніяй SCIC Tech. Гэта лёгкі калабаратыўны робат, просты ў праграмаванні і выкарыстанні, які падтрымлівае SDK. Акрамя таго, ён падтрымлівае выяўленне сутыкненняў, гэта значыць аўтаматычна спыняецца пры дотыку да чалавека, што з'яўляецца разумным узаемадзеяннем чалавека і машыны, забяспечваючы высокі ўзровень бяспекі.
| Калабаратыўны робат-манітор Z-Arm 4150 | Параметры |
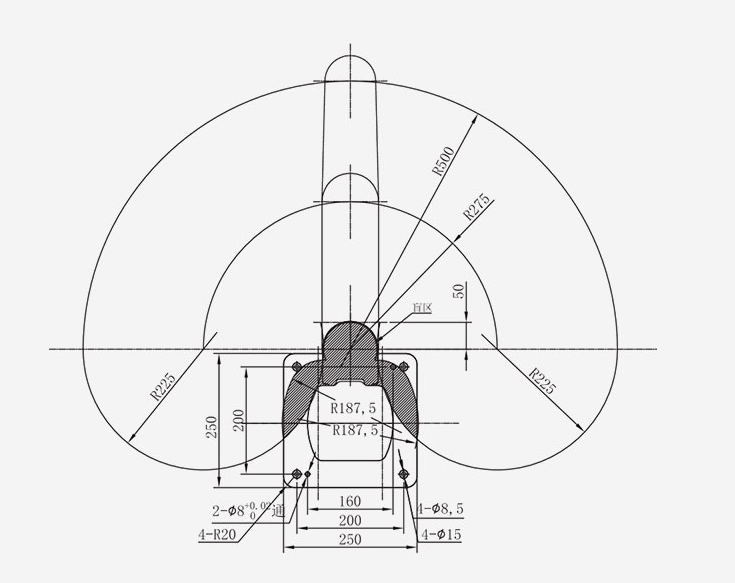
| Даўжыня рычага па 1 восі | 275 мм |
| Кут павароту 1 восі | ±90° |
| Даўжыня 2-восевай рычагі | 225 мм |
| Кут павароту па 2 восях | ±164° Дадаткова: 15-345° |
| Ход па восі Z | 410 Вышыня можа быць настроена |
| Дыяпазон кручэння восі R | ±1080° |
| Лінейная хуткасць | 1400 мм/с (карысная нагрузка 4 кг) |
| Паўтаральнасць | ±0,05 мм |
| Стандартная карысная нагрузка | 4 кг |
| Максімальная карысная нагрузка | 5 кг |
| Ступень свабоды | 4 |
| Блок харчавання | 220 В/110 В 50-60 Гц адаптуецца да пікавай магутнасці 48 В пастаяннага току 960 Вт |
| Камунікацыя | Ethernet |
| Пашыральнасць | Убудаваны інтэграваны кантролер руху забяспечвае 24 ўваходы/выхады + пашырэнне пад рукой |
| Вышыню восі Z можна наладзіць | 0,1 м ~ 1 м |
| Навучанне перацягванню па восі Z | / |
| Электрычны інтэрфейс зарэзерваваны | Стандартная канфігурацыя: 24 правады перасекам 23awg (неэкранаваныя) ад разеткі праз ніжнюю крышку рычага Дадаткова: 2 вакуумныя трубкі φ4 праз панэль разеткі і фланец |
| Сумяшчальныя электрычныя захопы HITBOT | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100/5thAxis, 3D-друк |
| Дыханне святла | / |
| Дыяпазон рухаў другой рукі | Стандартна: ±164° Дадаткова: 15-345° |
| Дадатковыя аксэсуары | / |
| Выкарыстоўвайце асяроддзе | Тэмпература навакольнага асяроддзя: 0-45°C Вільготнасць: 20-80% адноснай вільготнасці (без замярзання) |
| Лічбавы ўваход порта ўводу/вываду (ізаляваны) | 9+3+разгінанне перадплечча (па жаданні) |
| Лічбавы выхад порта ўводу/вываду (ізаляваны) | 9+3+разгінанне перадплечча (па жаданні) |
| Аналагавы ўваход порта ўводу/вываду (4-20 мА) | / |
| Аналагавы выхад порта ўводу/вываду (4-20 мА) | / |
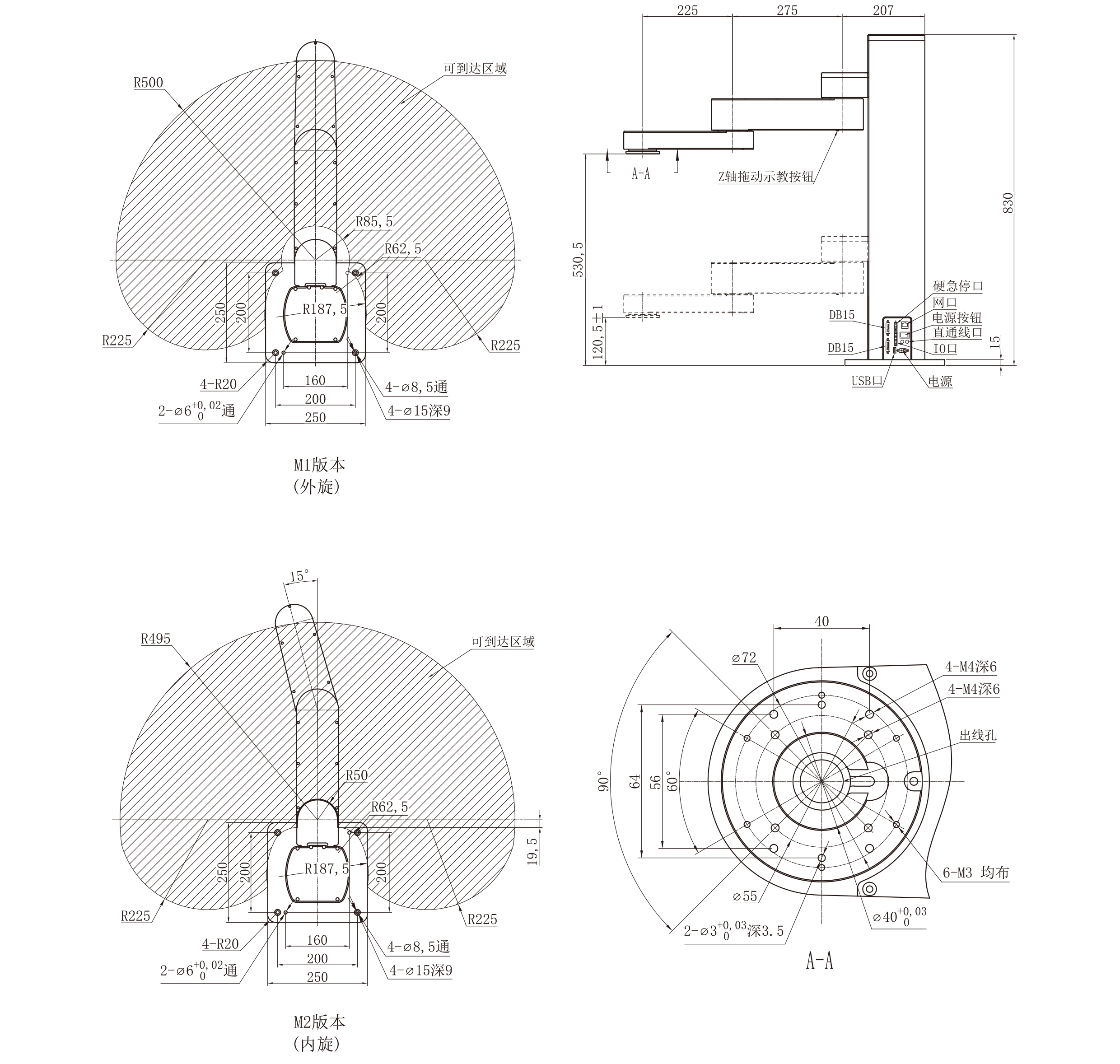
| Вышыня рукі робата | 830 мм |
| Вага рукі робата | Ход 410 мм, чыстая вага 28 кг |
| Памер базы | 250 мм * 250 мм * 15 мм |
| Адлегласць паміж адтулінамі для мацавання асновы | 200 мм * 200 мм з чатырма шрубамі M8 * 20 |
| Выяўленне сутыкненняў | √ |
| дрэг-навучанне | √ |
Максімальная нагрузка: 5 кг, ідэальны выбар для зборкі
Z-Arm XX50 — гэта гнуткая 4-восевая рабатызаваная рука, максімальная нагрузка якой можа дасягаць 5 кг, яна займае невялікую плошчу і выдатна падыходзіць для размяшчэння на працоўным месцы або ўнутры абсталявання. Яна ідэальна падыходзіць для аўтаматычных зборачных вытворчых ліній.

Лёгкі, вялікі кут павароту

Вага вырабу складае каля 28 кг, размах рычагоў да 275 мм, кут павароту 1-й восі складае ±90°, кут павароту 2-й восі — ±164°, дыяпазон павароту восі R можа дасягаць ±1080°.
Яго вышыню можна лёгка наладзіць
Інтэграваны прывад і кантролер, без дадатковых ланцугоў, просты ў ўсталёўцы і інтэграцыі, вышыня восі Z можа быць настроена ў межах ад 10 мм да 1000 мм, ён можа рэалізаваць унутранае кручэнне, каб пазбегнуць перашкод.

Гнуткае разгортванне, хуткае пераключэнне
Z-Arm XX50 — гэта рабатызаваная рука з высокай інтэграцыяй, якая валодае характарыстыкамі эканоміі месца і гнуткасці ў разгортванні, падыходзіць для выкарыстання ў розных сферах прымянення, не патрабуе змены звычайнай вытворчай схемы, у тым ліку хутка пераключаецца і дазваляе выконваць невялікія партыі і г.д.
Выдатнае супрацоўніцтва і бяспека
Робатызаваная рука можа супрацоўнічаць з чалавекам без дадатковай абароны, замяняючы брудныя, небяспечныя і сумныя задачы, каб пазбегнуць і паменшыць траўмы ад паўтаральных нагрузак і выпадковыя траўмы.

Дыяпазон руху Версія M1 (паварот вонкі)
Рэкамендацыя па раздыме DB15

Рэкамендаваная мадэль: пазалочаны мужчынскі раз'ём з корпусам ABS YL-SCD-15M пазалочаны жаночы раз'ём з корпусам ABS YL-SCD-15F
Апісанне памеру: 55 мм * 43 мм * 16 мм
(Глядзіце малюнак 5)
Дыяграма знешняга асяроддзя выкарыстання робата-маніпулятара

Наш бізнес


Катэгорыі прадуктаў
-

Нізкая цана шматразовага бяспекі ISO Certifiacte Cobot...
-

Szgh 6-восевы малярны прамысловы робат-арматур...
-

Кітайскі аптавік высокаэфектыўны 4-восевы палеталізатар...
-
Высокапрадукцыйная 5-восевая тэлескапічная рука робата для...
-

4086 Высокапрадукцыйная міні-робат-маніпулятор прамысловага...
-
Прамысловая машына, маніпулятар робата, 4-восевы маніпулятар...