СЕРЫЯ ЭЛЕКТРЫЧНЫХ ЗАХОПАЎ HITBOT – Z-EFG-R Калабаратыўны электрычны захоп



Галоўная катэгорыя
Прамысловая робата-маніпулятор / Калабаратыўны робата-маніпулятор / Электрычны захоп / Інтэлектуальны прывад / Рашэнні для аўтаматызацыі
Прыкладанне
Рабатызаваныя захопы серыі SCIC Z-EFG маюць невялікія памеры і ўбудаваную сервасістэму, што дазваляе дакладна кантраляваць хуткасць, становішча і сілу заціску. Перадавая сістэма захопу SCIC для аўтаматызацыі адкрые вам новыя магчымасці для аўтаматызацыі задач, якія вы ніколі не лічылі магчымымі.

Асаблівасць

·Невялікі, але магутны электрычны захоп з серварухавіком.
·Тэрміналы можна замяніць у адпаведнасці з рознымі патрабаваннямі праекта.
·Можа падымаць далікатныя і дэфармаваныя прадметы, такія як яйкі, прабіркі, кольцы і г.д.
·Падыходзіць для сцэн без крыніц паветра (напрыклад, лабараторый і бальніц).
Інтэграваная сервасістэма ўжываецца для розных запытаў
Вялікая сіла заціску
Сіла заціску: 80 Н,
ход: 20 мм
Кантроль дакладнасці
Паўтаральнасць: ±0,02 мм
Падключы і гуляй
Спецыяльна распрацаваны дляшасцівосевы электрычны захоп
Кантролер убудаваны
Невялікая плошча пакрыцця, зручная інтэграцыя.
Хвост можна змяніць
Яго хвост можна змяніць, каб ён выкарыстоўваўся для розных запытаў.
Мяккі заціск
Ён можа заціскаць далікатныя прадметы

● Садзейнічанне рэвалюцыі ў замене пнеўматычных захопаў электрычнымі захопамі, першы электрычны захоп з інтэграванай сервасістэмай у Кітаі.
● Ідэальная замена для паветранага кампрэсара + фільтра + электрамагнітнага клапана + дросельнай засланкі + пнеўматычнага захопу
● Шматцыклічны тэрмін службы, што адпавядае традыцыйнаму японскаму цыліндру




Параметр спецыфікацыі
Z-EFG-R — гэта рабатызаваны электрычны захоп з убудаваным кантролерам і некалькімі функцыямі ў адным. Невялікі па памеры, але магутны па функцыянальнасці.
● Невялікі, але магутны электрычны захоп з серварухавіком.
●Тэрміналы можна замяніць у адпаведнасці з рознымі патрабаваннямі праекта.
● Можа падымаць далікатныя і дэфармаваныя прадметы, такія як яйкі, прабіркі, кольцы і г.д.
● Падыходзіць для месцаў без крыніц паветра (напрыклад, лабараторыі і бальніцы).
Z-EFG-R — гэта невялікі электрычны захоп з інтэграванай сервасістэмай, які можа замяніць помпу + фільтр + электронна-магнітны вентылятар + дросельную засланку + паветраны захоп.
| Мадэль № Z-EFG-R | Параметры |
| Агульны інсульт | 20 мм |
| Сіла заціску | 80 Н |
| Паўтаральнасць | ±0,02 мм |
| Рэкамендаваная вага счаплення | 0,8 кг |
| Рэжым перадачы | Зубчастая рэйка + папярочная накіроўвалая роліка |
| Папаўненне змазкі рухомых кампанентаў | Кожныя шэсць месяцаў або 1 мільён рухаў / час |
| Час руху ў адзін бок | 0,45 с |
| Дыяпазон рабочых тэмператур | 5-55℃ |
| Дыяпазон рабочай вільготнасці | RH35-80 (без замярзання) |
| Рэжым руху | Два пальцы рухаюцца гарызантальна |
| Кантроль інсульту | Рэгуляваны |
| Рэгуляванне сілы заціску | Рэгуляваны |
| Вага | 0,5 кг |
| Памеры (Д*Ш*В) | 68*68*132,7 мм |
| Размяшчэнне кантролера | Убудаваны |
| Магутнасць | 5W |
| Тып рухавіка | бесшчоткавы пастаянны ток |
| Намінальнае напружанне | 24 В |
| Пікавы ток | 1A |
| Адаптыўная шасцівосевая робатамабільная рука | УР, Аўбо |
Убудаваныя кіраванне і кантролер
Z-EFG-R — гэта невялікі электрычны захоп з інтэграванай сервасістэмай, які можа замяніць паветраны помпа + фільтр + электронна-магнітны клапан + дросельную засланку + паветраны захоп.


Сумяшчальнасць з шасцівосевым робатам-маніпулятарам
Заціск сумяшчальны з асноўным шасцівосевым робатам-маніпуляторам, для рэалізацыі падключэння і працы, яго ход складае 20 мм, сіла заціску — 80 Н, ход і сіла заціску рэгулююцца.
Маленькая фігурка, гнуткая ў ўсталёўцы
Памер Z-EFG-R складае Д68*Ш68*В132,7 мм, яго канструкцыя кампактная, падтрымлівае некалькі метадаў мантажу, мае ўбудаваны кантролер, займае невялікую прастору, яго лёгка выкарыстоўваць для розных задач заціску.

Хуткая рэакцыя, кантроль дакладнасці
Найкарацейшы час руху аднаго ходу складае 0,45 с, яго паўтаральнасць — ±0,02 мм, яго хваставую частку можна лёгка змяніць, кліенты могуць заціскаць аб'ект па запыце.
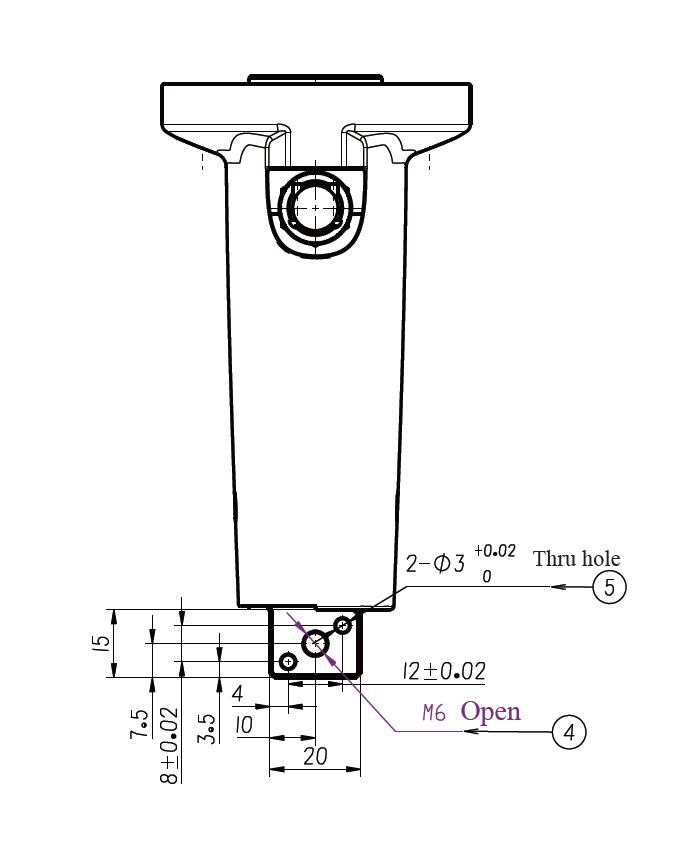
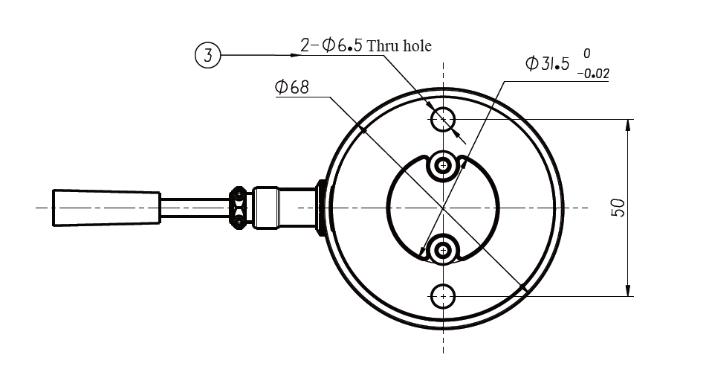
Схема ўстаноўкі памераў
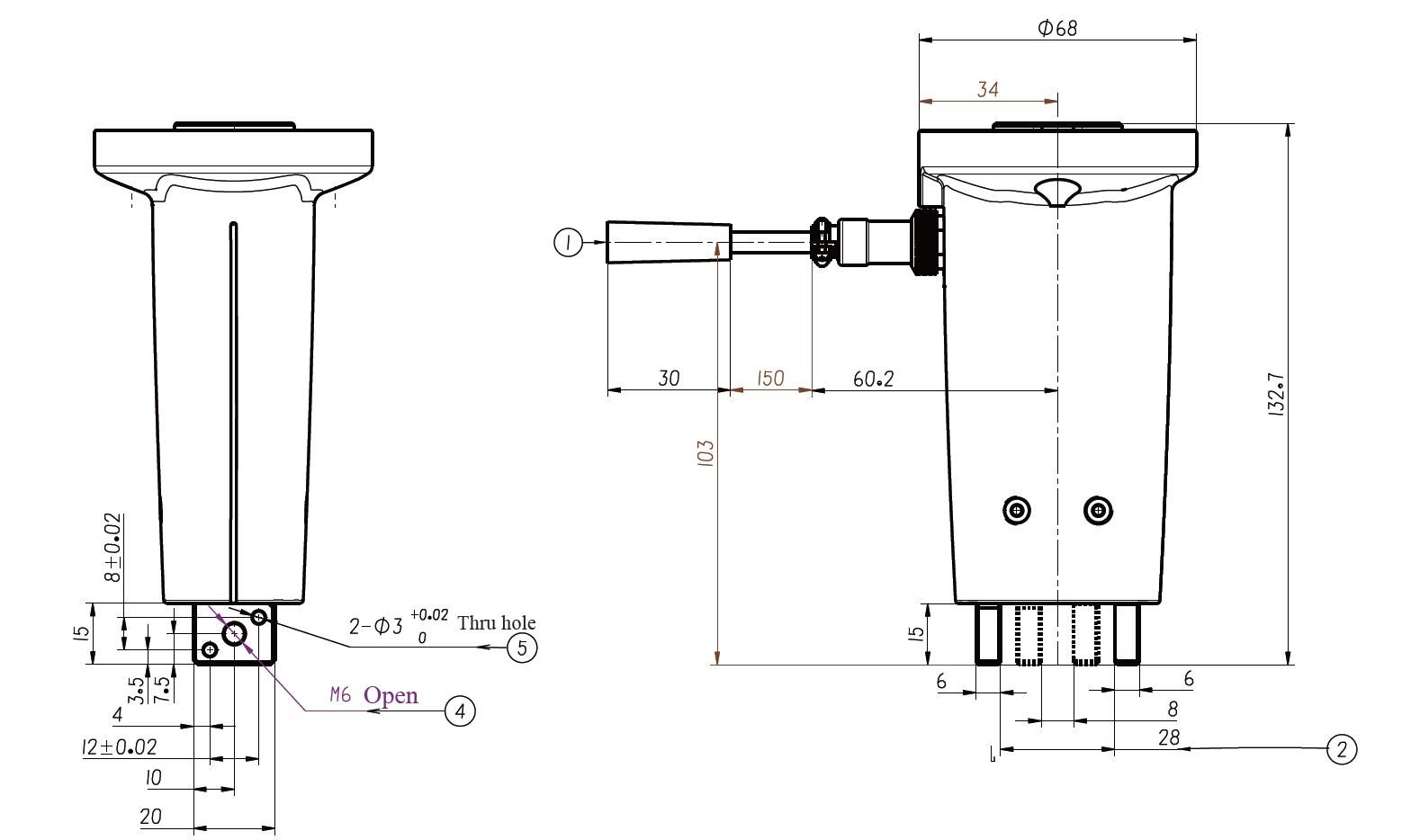
① RKMV8-354 Пяціжыльны авіяцыйны раз'ём для RKMV8-354
② Ход электрычнага захопу складае 20 мм
③ Пазіцыя ўстаноўкі, выкарыстоўвайце два шрубы M6 для злучэння з фланцам на канцы маніпулятара робата UR
④ Пазіцыя ўстаноўкі, становішча ўстаноўкі прыстасавання (шруба M6)
⑤ Пазіцыя ўстаноўкі, становішча ўстаноўкі прыстасавання (3 цыліндрычныя адтуліны для штыфта)
Электрычныя параметры
Намінальнае напружанне 24±2 В
Ток 0,4 А

Наш бізнес


Катэгорыі прадуктаў
-

DH ROBOTICS СЕРВАЭЛЕКТРЫЧНЫ ЗАХОПЛВАЛЬНІК СЕРЫІ PGE –...
-

DH ROBOTICS СЕРВАЭЛЕКТРЫЧНЫ ЗАХОПЛВАЛЬНІК СЕРЫІ RGI –...
-

DH ROBOTICS СЕРВАЭЛЕКТРЫЧНЫ ЗАХОПЛВАЛЬНІК СЕРЫІ PGE –...
-

СЕРЫЯ ЭЛЕКТРЫЧНЫХ ГРЫППЕРАЎ HITBOT – Z-EFG-50 Paral...
-

DH ROBOTICS СЕРВАЭЛЕКТРЫЧНЫ ЗАХОПЛВАЛЬНІК СЕРЫІ RGI –...
-

СЕРЫЯ ЭЛЕКТРЫЧНЫХ ЗАХОПАЎ HITBOT – Z-EFG-40...