СЕРЫЯ ЭЛЕКТРЫЧНЫХ ЗАХВАТАЎ HITBOT – Паралельны электрычны захоп Z-EFG-20


Галоўная катэгорыя
Прамысловая робата-маніпулятор / Калабаратыўны робата-маніпулятор / Электрычны захоп / Інтэлектуальны прывад / Рашэнні для аўтаматызацыі
Прыкладанне
Рабатызаваныя захопы серыі SCIC Z-EFG маюць невялікія памеры і ўбудаваную сервасістэму, што дазваляе дакладна кантраляваць хуткасць, становішча і сілу заціску. Перадавая сістэма захопу SCIC для аўтаматызацыі адкрые вам новыя магчымасці для аўтаматызацыі задач, якія вы ніколі не лічылі магчымымі.

Асаблівасць

· Убудаваны кантролер
· Рэгуляваны ход і сіла заціску
· Канец можна замяніць, каб адаптавацца да розных патрэб
· Збірайце далікатныя і дэфармаваныя прадметы, такія як яйкі,прабіркі, кольцы і г.д.
· Падыходзіць для памяшканняў без крыніцы паветра (напрыклад, лабараторыя, бальніца)
Дакладнасць кіравання, заціск у невялікай прасторы, хуткае і стабільнае зацісканне
Вялікая сіла заціску
Агульны ход 20 мм, сіла заціску 80 Н.
Дакладнасць для кіравання
Паўтаральнасць: ±0,02 мм
Доўгі тэрмін службы
Дзясяткі мільёнаў цыклаў, акрамя паветранага захопу
Кантролер убудаваны
Займае невялікую прастору, зручна інтэгруецца.
Рэжым кіравання
Імпульсныя кантролеры ўводу/вываду (дадаткова)
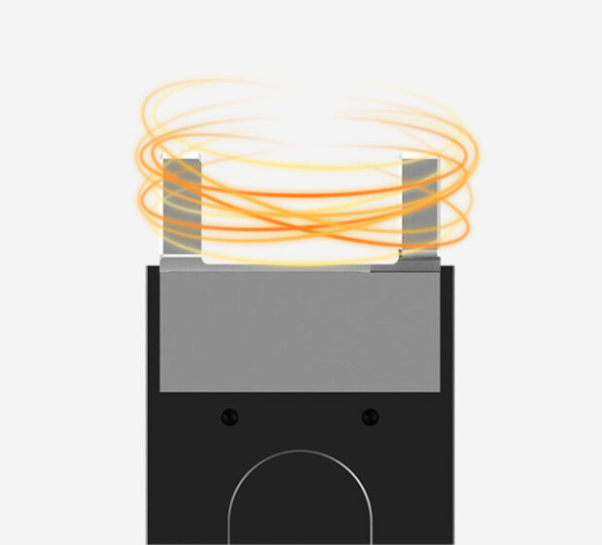
Мяккі заціск
Ён можа заціскаць далікатныя прадметы




Параметр спецыфікацыі
| Мадэль № Z-EFG-20 | Параметры |
| Усяго інсульт | 20 мм |
| Сіла заціску | 30~80 Н |
| Паўтаральнасць | ±0,02 мм |
| Рэкамендаваная вага счаплення | 0,8 кг |
| Перадача рэжым | Зубчастая рэйка + папярочная накіроўвалая роліка |
| Папаўненне змазкі рухомых кампанентаў | Кожныя шэсць месяцаў або 1 мільён рухаў / час |
| Час руху ў адзін бок | 0,45 с |
| Дыяпазон рабочых тэмператур | 5-55℃ |
| Дыяпазон вільготнасці працы | RH35-80(Няма марозу) |
| Рэжым руху | Два пальцы рухаюцца гарызантальна |
| Кантроль інсульту | Рэгуляваны |
| Рэгуляванне сілы заціску | Рэгуляваны |
| Вага | 0,458 кг |
| Памеры(Д*Ш*В) | 44*30*124,7 мм |
| Размяшчэнне кантролера | Убудаваны |
| Магутнасць | 5W |
| Тып рухавіка | бесшчоткавы пастаянны ток |
| Пікавы ток | 1A |
| Намінальнае напружанне | 24 В |
| Ток чакання | 0,2 А |
| Ударатрывалы / вібраўстойлівы | 98 м/с |
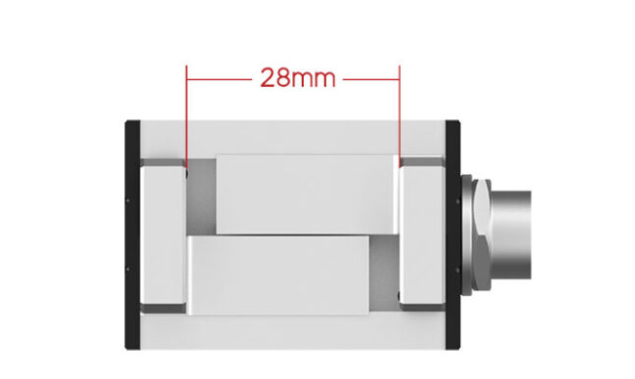
| Дыяметр рухавіка | 28 мм |
* Сіла заціску Z-EFG-20: Сіла заціску можа рэгулявацца шляхам дадання матэрыялу з кантраляванай дэфармацыяй да пярэдняй часткі прыстасавання, які атрымліваецца ў адпаведнасці з адпаведнай крывой дэфармацыі і сілы.
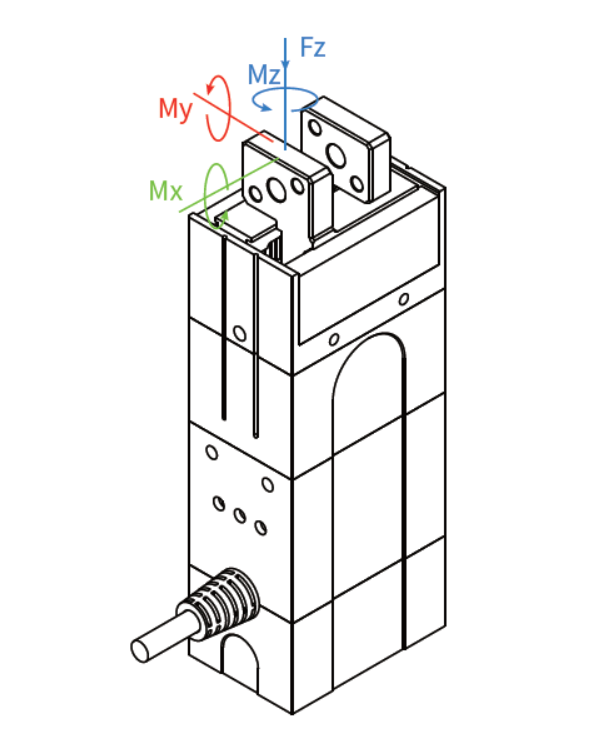
| Дапушчальная статычная нагрузка ў вертыкальным кірунку | |
| Фз: | 150 Н |
| Дапушчальны крутоўны момант | |
| Мкс: | 2,1 Нм |
| Маё: | 2,34 Нм |
| Мз: | 2 Нм |
Вялікая сіла заціску, дакладны кантроль сілы

Электрычны захоп мае спецыяльную канструкцыю трансмісіі і кампенсацыю разліку прывада, яго сіла заціску складае 80 Н з плаўнай рэгуляваннем, агульны ход — 20 мм, паўтаральнасць — ±0,02 мм.
Рэгуляванне рэжыму руху і ходу
Рух электрычнага захопу адносіцца да паралельнага руху двух пальцаў, яго найменшы час аднаго ходу складае ўсяго 0,45 с, вага заціску ≤0,8 кг, што адпавядае патрабаванням стабільнага заціску для вытворчай лініі.
Кампактная канструкцыя, гнуткая ў мантажы.

Памер Z-EFG-20 складае Д40*Ш30*В124,7 мм, яго канструкцыя кампактная, падтрымлівае больш за пяць рэжымаў усталёўкі, убудаваны кантролер займае невялікую прастору, што дазваляе лёгка выконваць розныя задачы заціску.


Інтэграваны прывад і кантролер, мяккі заціск

Хвост Z-EFG-20 можна лёгка змяніць, кліенты могуць заціскаць замоўленыя аб'екты, распрацоўваць дызайн хваста і выкарыстоўваць электрычны захоп для максімальнага выканання задач заціску.
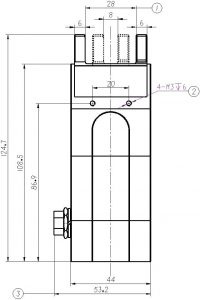
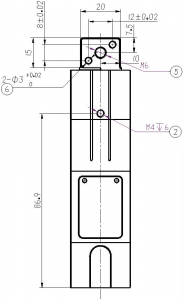
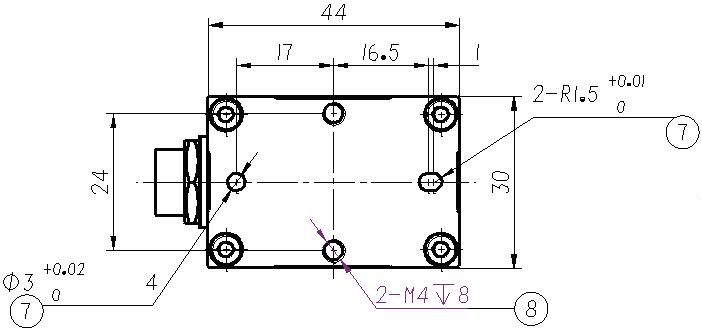
Схема ўстаноўкі памераў
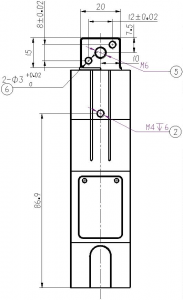
① Ход пальцаў захопу
② Бакавое мантажнае становішча (разьбовая адтуліна)
③ Размяшчэнне падключэння авіяцыйнай разеткі
④ Палажэнне сілы рэгулявання захопу (злева) і індыкатарнай лямпачкі (справа)
⑤ Пазіцыя ўстаноўкі захопу (разьбовая адтуліна)
⑥ Пазіцыя ўстаноўкі захопу (адтуліна для штыфта)
⑦ Ніжняе мантажнае становішча (адтуліна для штыфта)
⑧ Ніжняе мантажнае становішча ((разьбовая адтуліна)
Наш бізнес


Катэгорыі прадуктаў
-

СЕРЫЯ ЭЛЕКТРЫЧНЫХ ЗАХОПАЎ HITBOT – Z-EFG-C5...
-

DH ROBOTICS СЕРВАЭЛЕКТРЫЧНЫ ЗАХОПЛВАЛЬНІК СЕРЫІ PGE –...
-

DH ROBOTICS СЕРВАЭЛЕКТРЫЧНЫ ЗАХОПЛВАЛЬНІК СЕРЫІ RGI –...
-

DH ROBOTICS СЕРВАЭЛЕКТРЫЧНЫ ЗАХОПЛВАЛЬНІК СЕРЫІ RGI –...
-

DH ROBOTICS СЕРВАЭЛЕКТРЫЧНЫ ЗАХОПЛВАЛЬНІК СЕРЫІ RGI –...
-

DH ROBOTICS СЕРВАЭЛЕКТРЫЧНЫ ЗАХОПЛВАЛЬНІК СЕРЫІ PGC –...