SCARA ROBOTIC ARMS – Калабаратыўная рабатызаваная рука Z-Arm-2442B



Галоўная катэгорыя
Прамысловая робата-маніпулятор / Калабаратыўны робата-маніпулятор / Электрычны захоп / Інтэлектуальны прывад / Рашэнні для аўтаматызацыі
Прыкладанне
Кобаты SCIC Z-Arm — гэта лёгкія 4-восевыя калабарацыйныя робаты з убудаваным прывадным рухавіком, якія больш не патрабуюць рэдуктараў, як іншыя традыцыйныя SCARA, што зніжае кошт на 40%. Кобаты SCIC Z-Arm могуць выконваць такія функцыі, як, але не абмяжоўваючыся імі, 3D-друк, апрацоўка матэрыялаў, зварка і лазерная гравіроўка. Яны здольныя значна павысіць эфектыўнасць і гнуткасць вашай працы і вытворчасці.
Асаблівасці

Высокая дакладнасць
Паўтаральнасць
±0,02 мм
Вялікая карысная нагрузка
5 кг
Вялікі размах рук
Вось JI 220 мм
Вось J2 200 мм
Канкурэнтаздольная цана
Якасць прамысловага ўзроўню
Cканкурэнтаздольная цана
Звязаныя тавары



Параметр спецыфікацыі
SCIC Z-Arm 2442B распрацаваны кампаніяй SCIC Tech. Гэта лёгкі калабаратыўны робат, просты ў праграмаванні і выкарыстанні, які падтрымлівае SDK. Акрамя таго, ён падтрымлівае выяўленне сутыкненняў, гэта значыць аўтаматычна спыняецца пры дотыку да чалавека, што з'яўляецца разумным узаемадзеяннем чалавека і машыны, забяспечваючы высокі ўзровень бяспекі.
| Калабаратыўны робат-манітор Z-Arm 2442B | Параметры |
| Даўжыня рычага па 1 восі | 220 мм |
| Кут павароту 1 восі | ±90° |
| Даўжыня 2-восевай рычагі | 200 мм |
| Кут павароту па 2 восях | ±164° (дадаткова: 15-345°) |
| Ход па восі Z | 240 (Вышыня можа быць настроена) |
| Дыяпазон кручэння восі R | ±1080° |
| Лінейная хуткасць | 1600 мм/с (карысная нагрузка 4 кг) |
| Паўтаральнасць | ±0,02 мм |
| Стандартная карысная нагрузка | 4 кг |
| Максімальная карысная нагрузка | 5 кг |
| Ступень свабоды | 4 |
| Блок харчавання | 220 В/110 В 50-60 Гц адаптуецца да пікавай магутнасці 48 В пастаяннага току 200 Вт |
| Камунікацыя | Ethernet |
| Пашыральнасць | Убудаваны інтэграваны кантролер руху забяспечвае 24 ўваходы/выхады + пашырэнне пад рукой |
| Вышыню восі Z можна наладзіць | 0,1 м-0,5 м |
| Навучанне перацягванню па восі Z | / |
| Электрычны інтэрфейс зарэзерваваны | Стандартная канфігурацыя: 24 правады перасекам 23awg (неэкранаваныя) ад разеткі праз ніжнюю крышку рычага Дадаткова: 2 вакуумныя трубкі φ4 праз панэль разеткі і фланец |
| Сумяшчальныя электрычныя захопы HITBOT | E-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| Дыханне святла | / |
| Дыяпазон рухаў другой рукі | Стандартна: ±164° Дадаткова: 15-345° |
| Дадатковыя аксэсуары | / |
| Выкарыстоўвайце асяроддзе | Тэмпература навакольнага асяроддзя: 0-45°C Вільготнасць: 20-80%RH85 (без замярзання) |
| Лічбавы ўваход порта ўводу/вываду (ізаляваны) | 9+3+разгінанне перадплечча (па жаданні) |
| Лічбавы выхад порта ўводу/вываду (ізаляваны) | 9+3+разгінанне перадплечча (па жаданні) |
| Аналагавы ўваход порта ўводу/вываду (4-20 мА) | / |
| Аналагавы выхад порта ўводу/вываду (4-20 мА) | / |
| Вышыня рукі робата | 683 мм |
| Вага рукі робата | Ход 240 мм, чыстая вага 27 кг |
| Памер базы | 250 мм * 250 мм * 15 мм |
| Адлегласць паміж адтулінамі для мацавання асновы | 200 мм * 200 мм з чатырма шрубамі M8 * 20 |
| Выяўленне сутыкненняў | √ |
| дрэг-навучанне | √ |
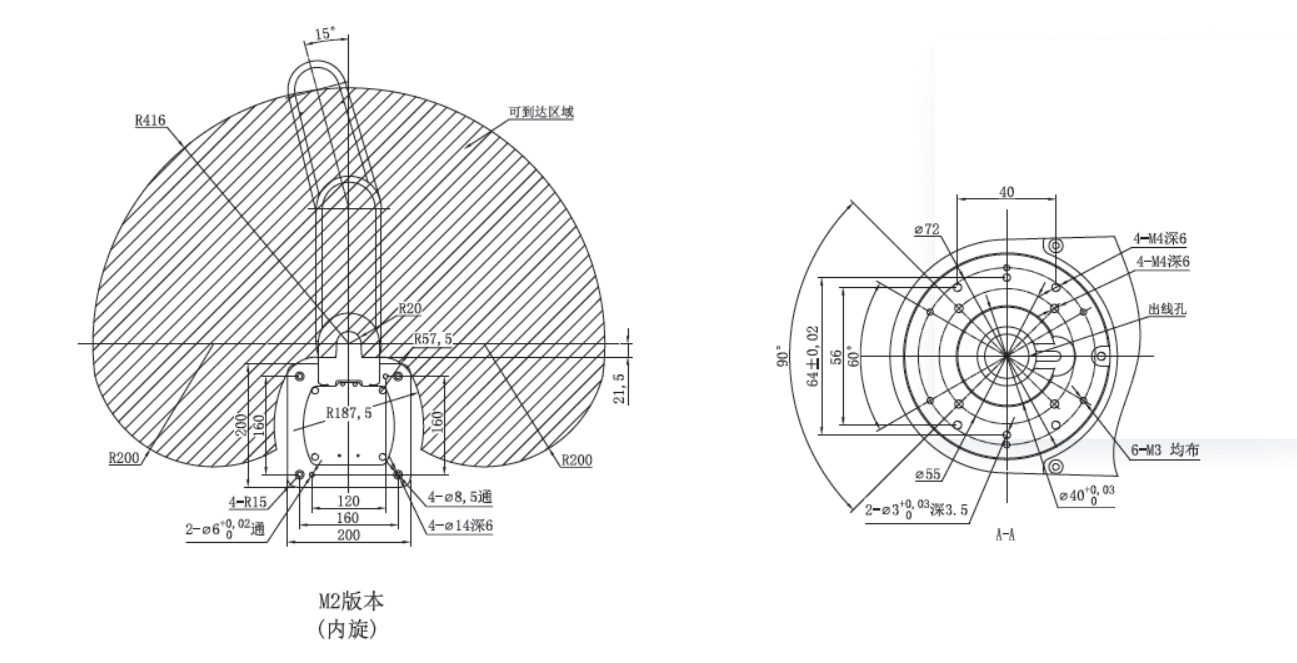
Дыяпазон руху Версія M1 (паварот вонкі)
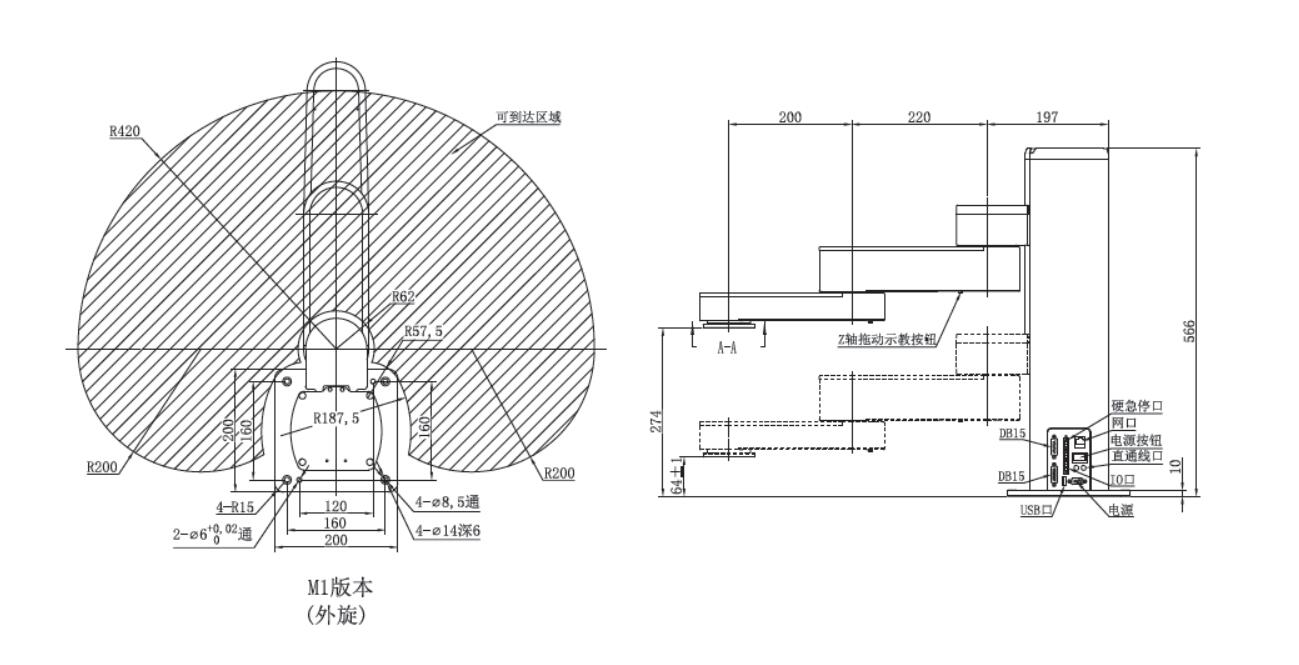
Уводзіны ў інтэрфейс

Інтэрфейс маніпулятара робата Z-Arm 2442 усталёўваецца ў 2 месцах: збоку асновы маніпулятара робата (вызначаецца як А) і ззаду канцавога маніпулятара. Інтэрфейсная панэль у пункце А мае інтэрфейс выключальніка харчавання (JI), інтэрфейс крыніцы харчавання 24 В DB2 (J2), выхад на порт карыстальніцкага ўводу/вываду DB15 (J3), порт карыстальніцкага ўводу/вываду DB15 (J4) і кнопкі канфігурацыі IP-адраса (K5). Порт Ethernet (J6), порт сістэмнага ўводу/вываду (J7) і два раздымы для прамых 4-жыльных правадоў J8A і J9A.
Меры засцярогі
1. Інерцыя карыснай нагрузкі
Цэнтр цяжару карыснай нагрузкі і рэкамендаваны дыяпазон карыснай нагрузкі з улікам інэрцыі руху восі Z паказаны на малюнку 1.

Малюнак 1. Апісанне карыснай нагрузкі серыі XX32
2. Сіла сутыкнення
Сіла спрацоўвання абароны ад сутыкнення гарызантальных суставаў: сіла серыі XX42 складае 40 Н.
3. Знешняя сіла па восі Z
Знешняя сіла восі Z не павінна перавышаць 120 Н.

Малюнак 2
4. Заўвагі па ўсталёўцы карыстальніцкай восі Z, падрабязнасці глядзіце на малюнку 3.

Малюнак 3
Папярэджанне:
(1) Для наладжвальнай восі Z з вялікім ходам калянасць восі Z памяншаецца па меры павелічэння ходу. Калі ход восі Z перавышае рэкамендаванае значэнне, карыстальнік мае патрабаванні да калянасці, а хуткасць перавышае 50% ад максімальнай хуткасці, настойліва рэкамендуецца ўсталяваць апору за воссю Z, каб забяспечыць адпаведнасць калянасці маніпулятара робата патрабаванням на высокай хуткасці.
Рэкамендаваныя значэнні наступныя: ход восі Z серыі Z-ArmXX42 >600 мм
(2) Пасля павелічэння ходу восі Z вертыкальнасць восі Z і асновы значна зніжаецца. Калі строгія патрабаванні да вертыкальнасці восі Z і апорнай кропкі недастасоўныя, звярніцеся да тэхнічнага персаналу асобна.
5. Гарачае падключэнне кабеля харчавання забаронена. Папярэджанне аб адваротным кірунку пры адключэнні дадатнага і адмоўнага полюсаў крыніцы харчавання.
6. Не націскайце на гарызантальны рычаг, калі электраэнергія выключана.

Малюнак 4
Рэкамендацыя па раздыме DB15

Малюнак 5
Рэкамендаваная мадэль: пазалочаны мужчынскі раз'ём з корпусам ABS YL-SCD-15M пазалочаны жаночы раз'ём з корпусам ABS YL-SCD-15F
Апісанне памеру: 55 мм * 43 мм * 16 мм
(Глядзіце малюнак 5)
Стол заціскаў, сумяшчальных з маніпулятарамі робата
| Нумар мадэлі робата-маніпулятара | Сумяшчальныя захопы |
| XX42 Т1 | Z-EFG-8S НК/Z-EFG-12 НК/Z-EFG-20 НМ НМА/Z-EFG-20S/ Z-EFG-30NM NMA 3D-друк па 5-й восі |
| XX42 Т2 | Z-EFG-50 ALL/Z-EFG-100 TXA |
Дыяграма памераў усталёўкі адаптара харчавання
Блок харчавання RSP-500-SPEC-CN канфігурацыі XX42, 24 В, 500 Вт

Дыяграма знешняга асяроддзя выкарыстання робата-маніпулятара

Наш бізнес







